





实用干货|仙知Roboshop Pro 使用入门(七)——任务链二
Roboshop Pro®是 Seer Robotics ®(上海仙知机器人科技有限公司) 开发的用于移动机器人应用的专业级客户端软件。本客户端软件需要配合由【仙知机器人®】 提供的 【移动机器人】或【控制器】使用。
上期介绍了Roboshop Pro使用入门(六)——任务链,本期将介绍Roboshop Pro 使用入门(七)——机器人控制和使用中的“任务链”功能第二部分;后续还会持续更新Roboshop Pro的使用,敬请关注!
可拖拽标签
如下图,被框选部分为【任务链】模块的【可拖拽标签】区域,【可拖拽标签】的类别可分为五大类,即:【机器人控制】、【任务管理器】、【底盘设备控制】、【辊筒(皮带)控制】以及【音频控制】。
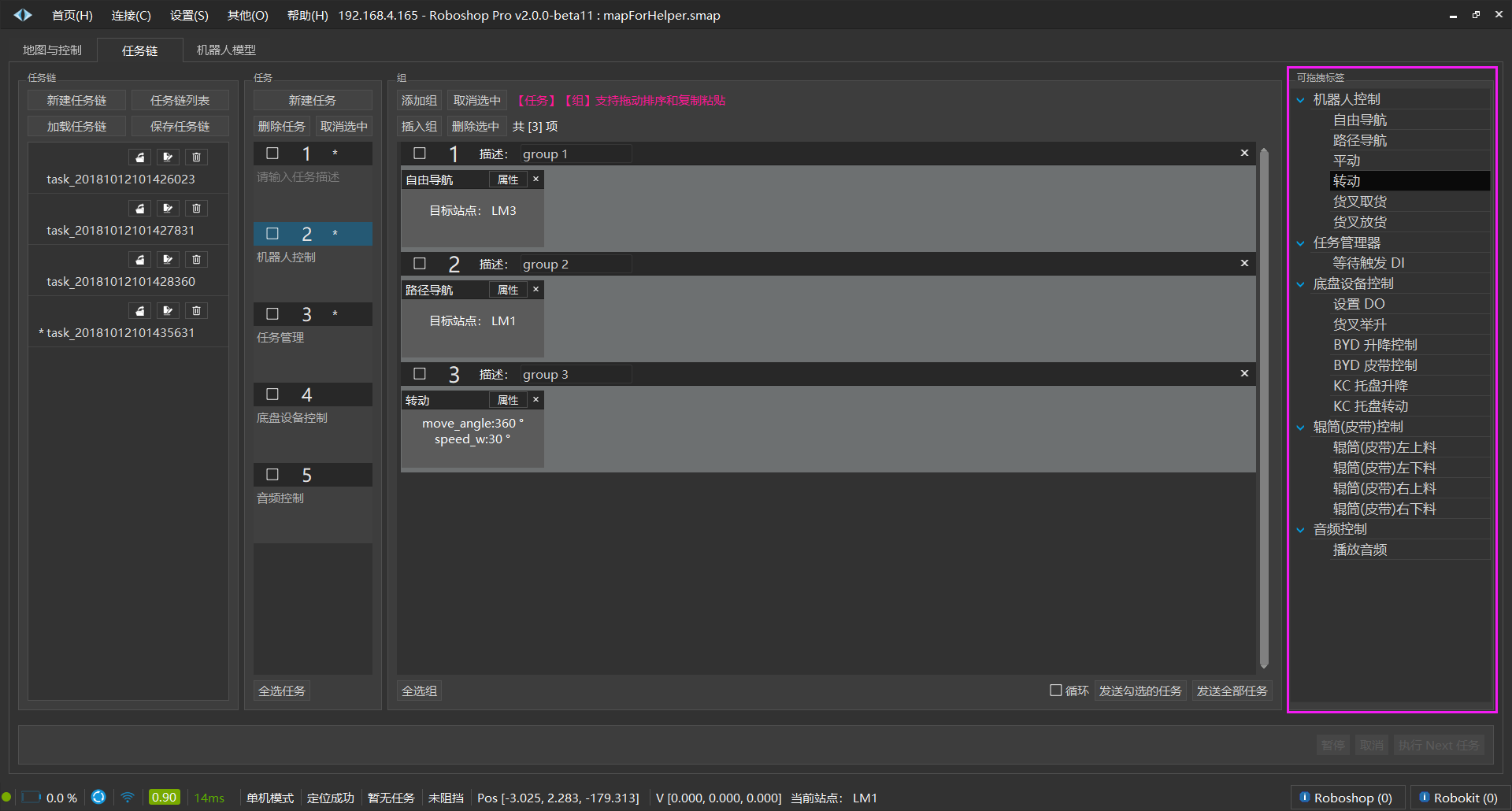
使用时,只需要将需要的标签直接拖拽到对应的组里面即可。在组里添加标签成功之后,必须点击此标签进行必要的编辑。
1.机器人控制:
【自由导航】:让机器人自己规划路径到目标点。
【路径导航】:让机器人按照规定的路径移动到目标点。
【平动】:让机器人按照给定的速度移动指定的距离。
【转动】:让机器人按照给定的角速度转动指定的角度。
【货叉取货】:控制叉车取货(仅对叉车有效)。
【货叉放货】:控制叉车放货(仅对叉车有效)。
2.任务管理器:
【等待触发DI】:等待DI信号。
3.底盘设备控制:
【设置DO】:设置机器人底盘指定的DO的状态。
【货叉举升】:控制叉车的货叉移动到指定的高度(仅对叉车有效)。
【BYD升降控制】:仅对BYD机器人有效。
【BYD皮带控制】:仅对BYD机器人有效。
【KC托盘升降】:仅对KC机器人有效。
【KC托盘转动】:仅对KC机器人有效。
4.辊筒(皮带)控制:
【辊筒(皮带)左上料】:控制辊筒(皮带)从左边上料。
【辊筒(皮带)左下料】:控制辊筒(皮带)从左边下料。
【辊筒(皮带)右上料】:控制辊筒(皮带)从右边上料。
【辊筒(皮带)右下料】:控制辊筒(皮带)从右边下料。
此功能仅对有辊筒或者皮带的机器人有效。
5.音频控制:
【播放音频】:播放指定的机器人中存在的音频文件。
任务链操作
如下图所示,被框选部分为【任务链操作区域】,其功能包括:【暂停\继续】、【取消】、【执行Next任务】。这三个功能只有在机器人执行任务链的时候才会处于激活状态。
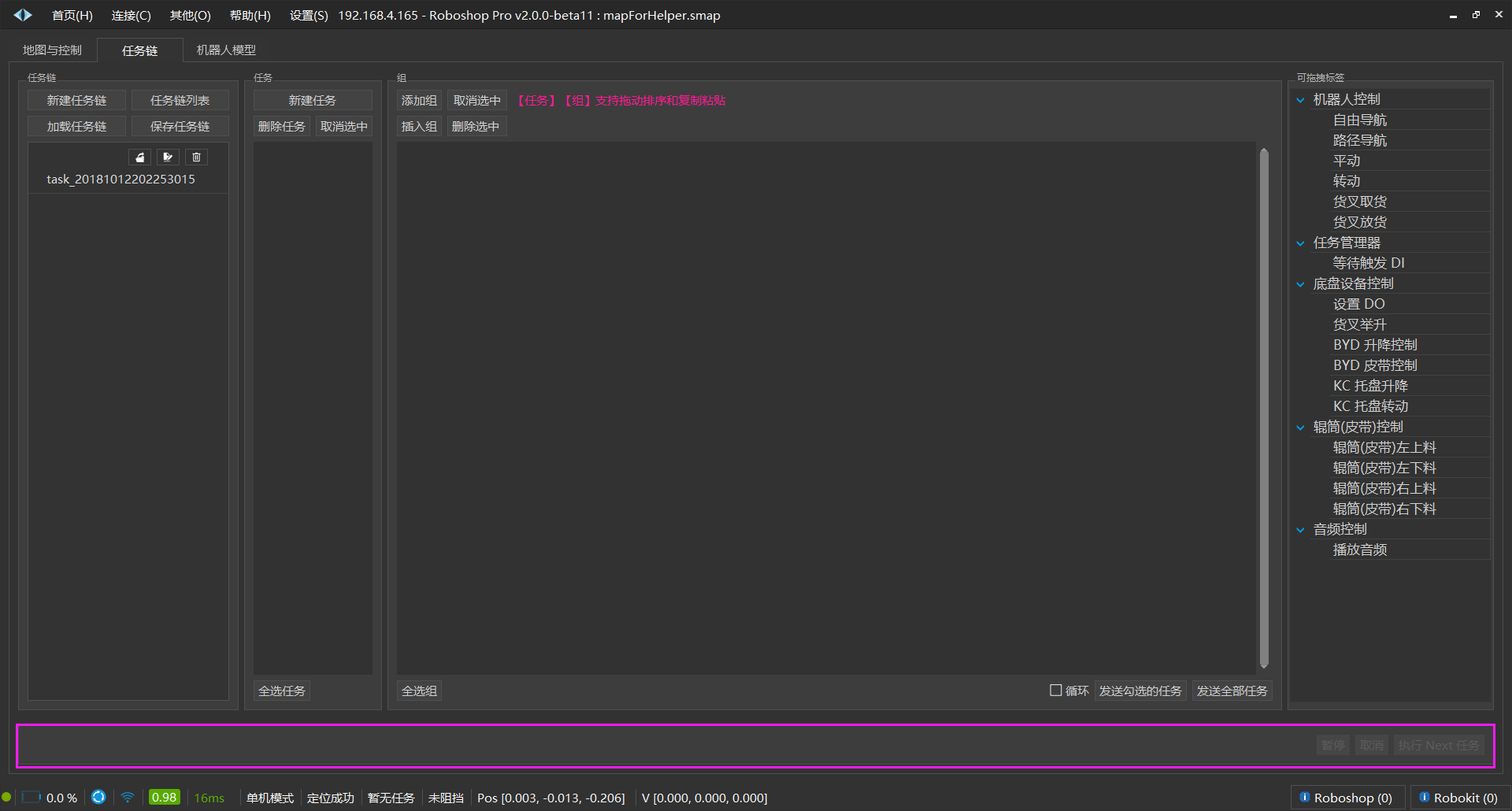
1.暂停\继续:
功能:当机器人正在执行任务链时,控制机器人暂停执行正在执行的任务链;当机器人暂停执行任务链时,或者控制机器人继续执行原来的任务链。
2.取消:
功能:当机器人正在执行任务链时,控制机器人放弃执行当前任务链。
3.执行Next任务:
功能:当机器人正在执行任务链时,控制机器人顺序执行任务连中的下一条任务;如果机器人正在执行任务链中的最后一条任务,点击此按钮之后,当前任务链将会直接被执行完成。
有关仙知
上海仙知机器人科技有限公司,是一家以移动机器人控制与调度为核心的高新技术企业。作为一站式移动机器人方案专家,仙知机器人掌握了具有自主知识产权的移动机器人核心技术,并在工业自动化领域内拥有丰富的项目经验。仙知机器人致力于服务各行业集成商,并为其提供包括移动机器人控制、调度与信息管理在内的一站式移动机器人解决方案。
目前,仙知机器人的产品、技术及解决方案已在汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务、医疗教育等领域广泛应用。
仙知机器人积极践行企业使命—“让智能创造价值”,不断坚持技术创新,并以开放包容、合作共赢的姿态携手合作伙伴,最大程度地满足客户对产品、技术与解决方案的高品质追求,力争“成为机器人产业的创新者与引领者!”

 分享
分享
图片新闻




中国机器人产业大会圆满收官!")



最新活动更多
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")
- 1 【独家深度】2025年中国机器人激光雷达行业市场调研
- 2 人形机器人革命,NVIDIA如何破局?
- 3 《2025机器人+应用与产业链新一轮加速发展蓝皮书》电子版限免下载!
- 4 用信步工控主板,当行业冠军,“天工”机器人马拉松夺冠!
- 5 信步科技发布具身智能开发平台HB03,实现机器人“大、小脑融合”
- 6 MOONLIGHT 玄晖成为全球首款获得 CE+ETL双认证的力控型并联机器人
- 7 【展商推荐】意优科技:专注于人形机器人关节模组的研发与生产
- 8 纤尘不染|新时达众为兴洁净型SCARA机器人新品重磅发布
- 9 MiR 发布最新电子书,揭示AMR 革新医院物流全流程
- 10 智同科技举行总部基地奠基仪式:以匠心筑基,与时代同行



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论