





仙知小课堂|仙知网络协议API使用教程(十六)
为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。
仙知小课堂
之前分别介绍了机器人导航API—API列表、暂停当前导航、继续当前导航、取消当前导航等,本期将继续介绍“机器人导航API”,包括“路径导航”、“获取路径导航的路径”、“平动”及“转动”:
路径导航
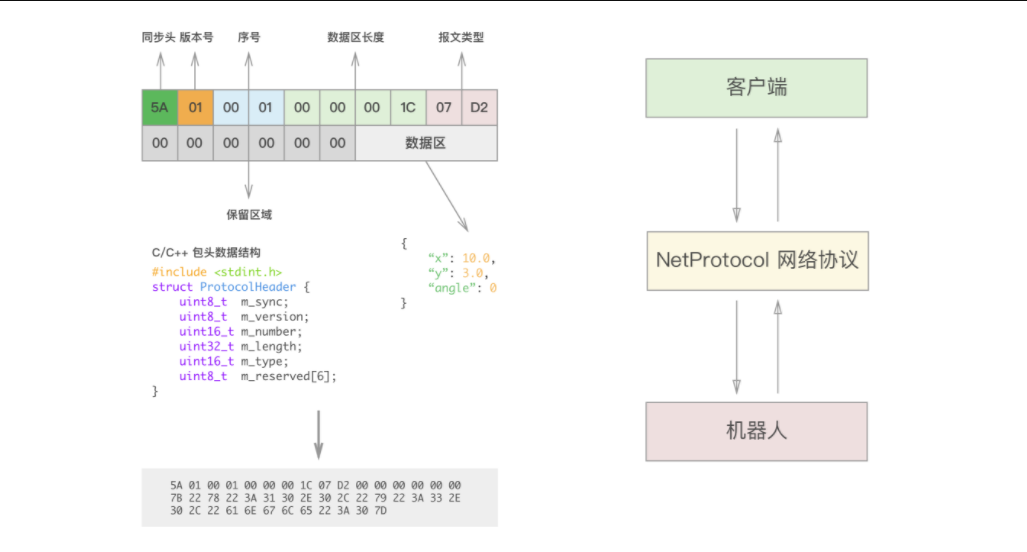
路径导航为给定目标站点, 由机器人自动规划沿着贝塞尔曲线的路径运行, 期间会经过其它中间站点但不会停留。
请求
编号: 3051 (0x0BEB)
名称: robot_task_gotarget_req
描述: 路径导航
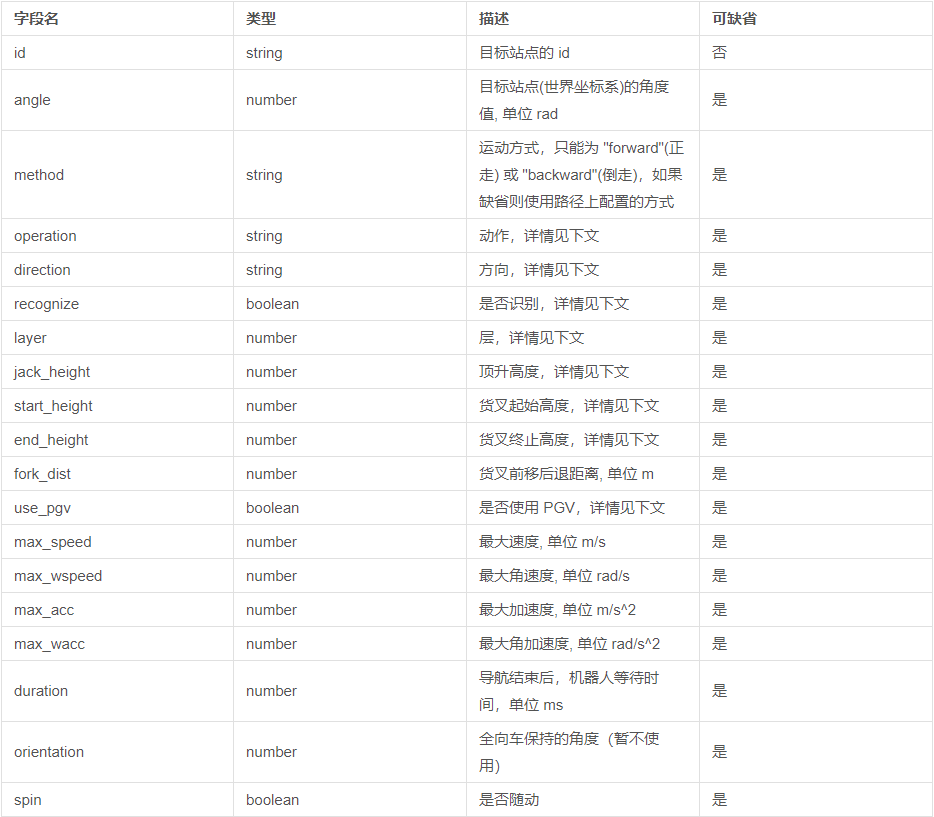
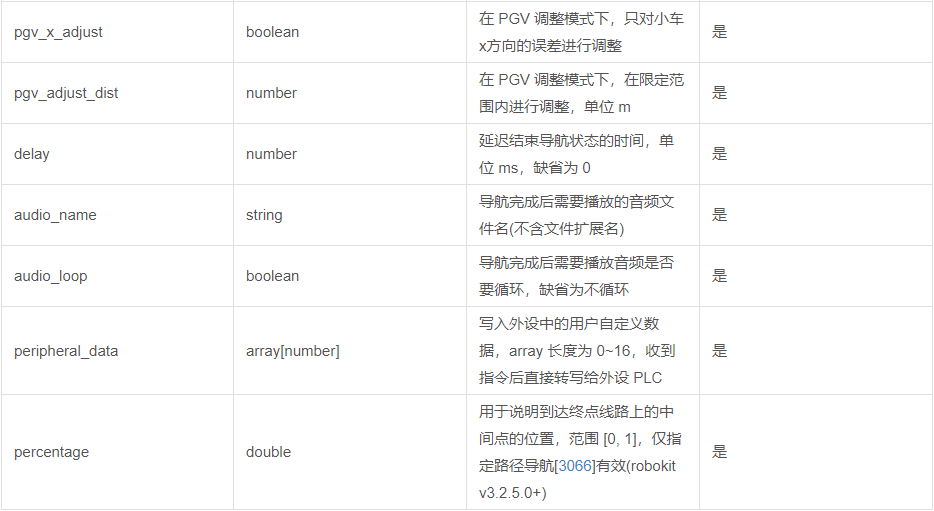
JSON 数据区: 见下表
注意 1: angle 为到点朝向, 如果缺省则会使用站点上设置的值。
注意 2: max_speed, max_wspeed, max_acc, max_wacc 字段不建议使用, 最好通过地图上的路径和区域属性或机器人参数来控制这些值, 并且这些字段可能在将来被删除。
请求示例

operation 相关说明
在 Roboshop pro 中使用路径导航至 AP(或 TL,WL)点时,可以选择执行动作(含义为导航至AP并执行动作),如下图:

根据 AP 点上配置的执行对象和识别模型文件,可以执行各种动作。
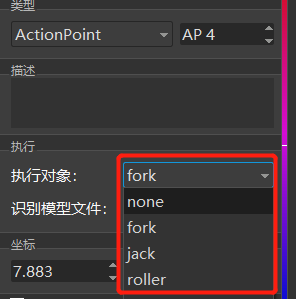
此时需要在路径导航指令中增加更多参数来使机器人导航至目标点并完成相应的动作,现说明如下:
1、货叉
AP 点的执行对象需配置为 fork,识别模型文件按需求配置为栈板的模型文件或者不配置。
operation:动作可以为 "ForkLoad" 或 "ForkUnload"
recognize:代表插入栈板时是否需要识别(如果需要识别,请确保识别模型文件配置正确)
layer:为需要货叉插入的栈板层数(仅 recognize = true 时有意义)
start_height:动作开始时,货叉的起始高度(仅 recognize = false 时有意义)
end_height:动作结束后,货叉的终止高度(仅 recognize = false 时有意义)
2、辊筒
AP 点的执行对象需配置为 roller,识别模型文件不需要配置。(roller 目前不存在识别)
operation:动作可以为 "RollerLoad" 或 "RollerUnload"。
direction:为辊筒运动的方向,可以为 "left" 或 "right"。
recognize:代表是否需要识别(对于辊筒来说,recognize 目前无效)。

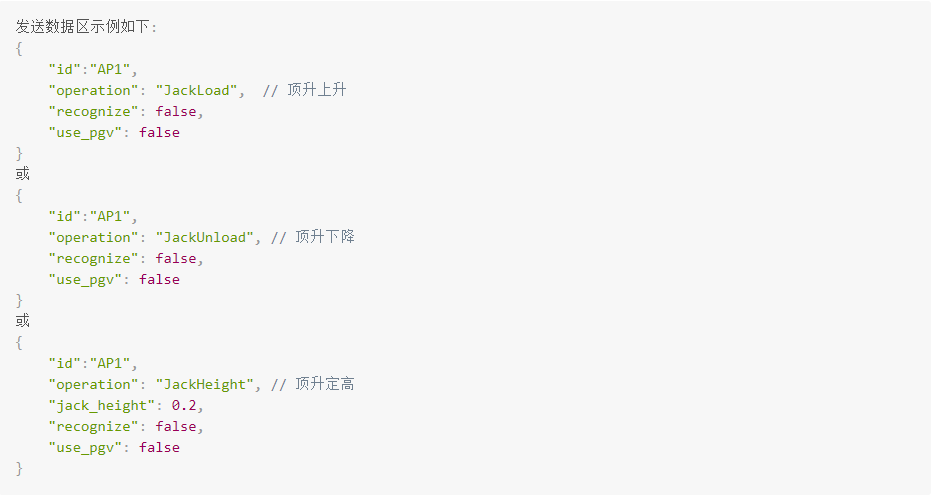
3、顶升
AP 点的执行对象需配置为 jack,识别模型文件按需求配置为货架的模型文件或者不配置。
operation:动作可以为 "JackLoad" 或 "JackUnload" 或 "JackHeight"。
jack_height:为顶升定高的高度(仅 operation = "JackHeight" 时才有意义)。
recognize:代表钻入货架时是否需要识别(如果需要识别,请确保识别模型文件配置正确,对于需要识别钻货架顶升的使用,请参考该教程)。
use_pgv:代表是否使用 PGV 传感器矫正钻入货架后的位置。
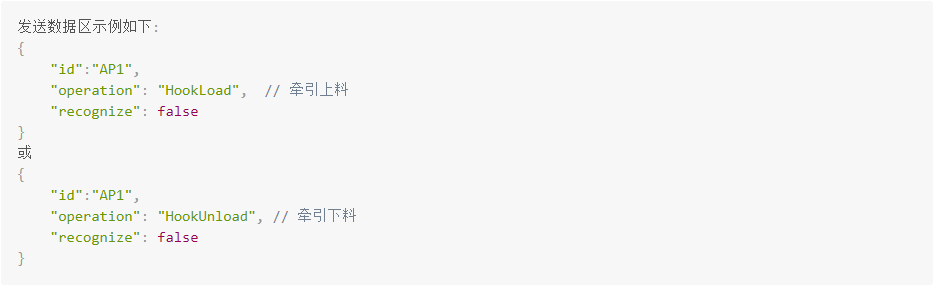
4、牵引
AP 点的执行对象需配置为 hook,识别模型文件按需求配置为料车的模型文件或者不配置。
operation:动作可以为 "HookLoad" 或 "HookUnload"
recognize:代表牵引料车前是否需要识别

响应
编号: 13051 (0x32FB)
名称: robot_task_gotarget_res
描述: 路径导航的响应
JSON 数据区: 见下表

响应示例
略
获取路径导航的路径
该请求只返回使用路径导航去到目标点所规划的路径, 并不实际执行导航。
请在机器人未进行导航时使用该指令,请勿在机器人导航时使用该指令,否则会造车机器人停止。
请求
编号: 3053 (0x0BED)
名称: robot_task_target_path_req
描述: 获取路径导航的路径
JSON 数据区: 见下表

请求示例
略
响应
编号: 13053 (0x32FD)
名称: robot_task_target_path_res
描述: 获取路径导航的路径的响应
JSON 数据区: 见下表

响应示例
略
平动
请求
编号: 3055 (0x0BEF)
名称: robot_task_translate_req
描述: 平动,以固定速度直线运动固定距离
JSON 数据区: 见下表
注意: 3055(平动), 3056(转动), 3057 不能同时进行
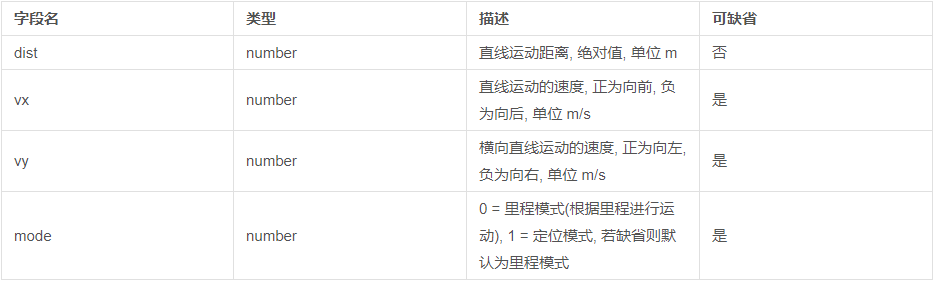
如果 vx, vy 都有值, 则会将速度合成。
里程模式不需要定位精准, 但是对于长距离的运动可能会产生较大误差, 误差随距离的增大而增大。
定位模式需要当前环境定位稳定, 误差与当前环境和定位精度相关。
请求示例
略
响应
编号: 13055 (0x32FF)
名称: robot_task_translate_res
描述: 平动,以固定速度直线运动固定距离的响应
JSON 数据区: 见下表

响应示例
略
转动
请求
编号: 3056 (0x0BF0)
名称: robot_task_turn_req
描述: 转动, 以固定角速度旋转固定角度
JSON 数据区: 见下表
注意: 3055(平动), 3056(转动), 3057 不能同时进行
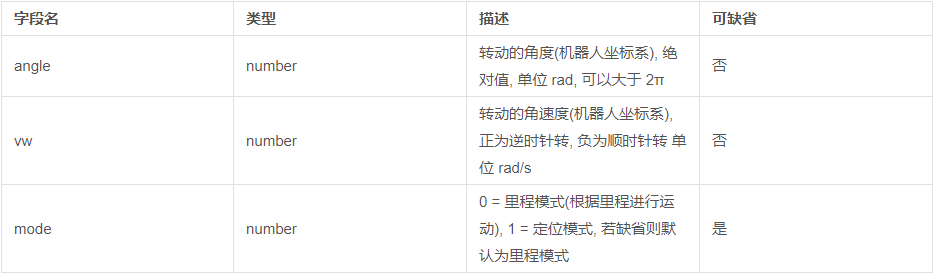
里程模式不需要定位精准, 但是对于角度很大的转动动可能会产生较大误差, 误差随旋转角度的增大而增大。
定位模式需要当前环境定位稳定, 误差与当前环境和定位精度相关。
请求示例
略
响应
编号: 13056 (0x3300)
名称: robot_task_turn_res
描述: 转动, 以固定角速度旋转固定角度的响应
JSON 数据区: 见下表

响应示例
略
有关仙知
仙知机器人,是一家以移动机器人控制与调度为核心的高新技术企业。作为一站式移动机器人方案专家,仙知机器人掌握了具有自主知识产权的移动机器人核心技术,并在工业自动化领域内拥有丰富的项目经验。仙知机器人致力于服务各行业集成商,并为其提供包括移动机器人控制、调度与信息管理在内的一站式移动机器人解决方案。
目前,仙知机器人的产品、技术及解决方案已在汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务、医疗教育等领域广泛应用。
仙知机器人积极践行企业使命—“让智能创造价值”,不断坚持技术创新,并以开放包容、合作共赢的姿态携手合作伙伴,最大程度地满足客户对产品、技术与解决方案的高品质追求,力争“成为机器人产业的创新者与引领者!”

 分享
分享
图片新闻








最新活动更多
-
4月22日立即报名>> 【在线会议】ADI六款仪器仪表方案助力产品快速上市
-
4月23日立即报名>> 【直播】 智测未来·2026海克斯康春季产品创新日
-
4月23日立即报名>>> 深圳“OFweek 2026医疗机器人创新发展峰会“
-
5月13日立即预约>>> 【线下会议】恩智浦创新技术峰会·深圳
-
5月14日立即下载>> 【白皮书】村田室内外定位解决方案
-
5月29日立即下载>> 【白皮书】工业视觉AI实战白皮书合集
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")
- 1 2026上市狂飙:具身智能IPO潮起,宇树之后,下一个会是谁?
- 2 2026年3月,国内具身智能机器人企业融资情况汇总
- 3 仅一季度,中国诞生了一批具身智能百亿独角兽!
- 4 艾利特机器人完成6亿元D+轮融资 布局AI产业链,加速全球战略落地
- 5 宇树科技招股书透视:中外具身智能玩家生存竞速
- 6 宇树冲击IPO,王兴兴的“价格屠刀”能否砍出下一个万亿赛道?
- 7 拆解宇树科技招股书:人形机器人第一股的“来路”与“去路”
- 8 破解具身智能数据瓶颈:哪条技术路线才是最优解?单选Or并行?
- 9 谁说未来不好找工作?4000亿规模的具身智能赛道100万人才缺口浮现!
- 10 2026年,具身智能开启工业单场景落地元年



发表评论
登录
手机
验证码
手机/邮箱/用户名
密码
立即登录即可访问所有OFweek服务
还不是会员?免费注册
忘记密码其他方式
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论