





科学家研发出磁驱动高速软体机器人:会行走、悬浮、捉苍蝇
2020-09-27 09:40
来源:
快科技
据国内媒体报道,《通讯-材料》最新发表了一篇技术研发成果论文,研究人员已成功研发出一种新型的磁驱动高速软体机器人,这种机器人可以行走、游泳、漂浮和捕捉活体苍蝇。
这种机器人外形如同纸张,可以做到薄如蝉翼。材料内部被嵌入了微小的磁体,无需电力驱动,可以根据磁场变化进行形状、动作的变化。
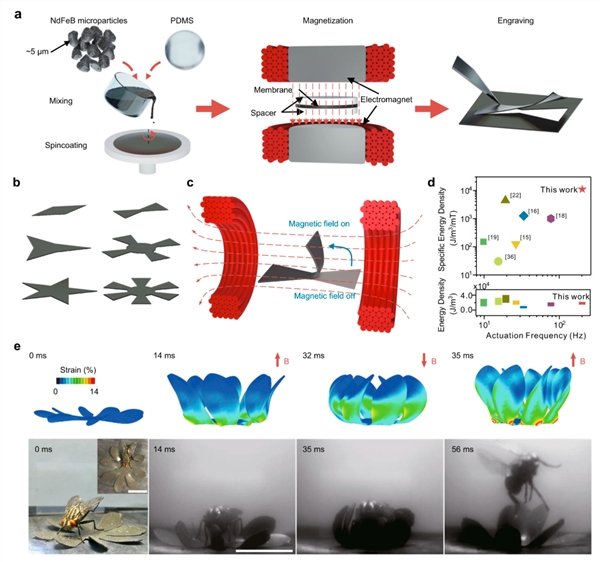
论文通讯作者Denys Makarov及其团队在论文中展示了磁驱动高速软体机器人的设计原理、材料和制作工艺。
他们在机器人体内嵌入微小的磁体,能快速响应磁场,实现了迄今最高的比能量密度,这对于低磁场下的高速驱动很关键。
在实验示例中,重23mg、厚200um的四臂机器人在3.7mT磁场作用下漂浮;蝠鲼形态的机器人可以在水中运输物品,尺寸为17mmx19mm,厚度80um;一个六臂机器人可以抓取、运输和释放无磁性物体,直径20mm厚度80um。
一个花形机器人在一只苍蝇触发陷阱后捕捉了它,随后张开磁驱动的八臂释放了它,其直径25mm,厚度200um。

 分享
分享
声明:
本文系OFweek根据授权转载自其它媒体或授权刊载,目的在于信息传递,并不代表本站赞同其观点和对其真实性负责,如有新闻稿件和图片作品的内容、版权以及其它问题的,请联系我们。
图片新闻




中国机器人产业大会圆满收官!")



最新活动更多
-
6月13日立即参评>> 【评选】维科杯·OFweek2025中国工业自动化及数字化行业年度评选
-
6月13日立即参评>> 【评选启动】维科杯·OFweek(第四届)2025汽车行业年度评选
-
6月13日立即参评 >> 【评选启动】维科杯·OFweek 2025(第十届)人工智能行业年度评选
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
-
7月31日免费预约>> OFweek 2025具身机器人动力电池技术应用大会
-
即日-2025.8.1立即下载>> 《2024智能制造产业高端化、智能化、绿色化发展蓝皮书》
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")
- 1 【独家深度】2025年中国机器人激光雷达行业市场调研
- 2 人形机器人革命,NVIDIA如何破局?
- 3 《2025机器人+应用与产业链新一轮加速发展蓝皮书》电子版限免下载!
- 4 用信步工控主板,当行业冠军,“天工”机器人马拉松夺冠!
- 5 信步科技发布具身智能开发平台HB03,实现机器人“大、小脑融合”
- 6 【展商推荐】意优科技:专注于人形机器人关节模组的研发与生产
- 7 MOONLIGHT 玄晖成为全球首款获得 CE+ETL双认证的力控型并联机器人
- 8 纤尘不染|新时达众为兴洁净型SCARA机器人新品重磅发布
- 9 MiR 发布最新电子书,揭示AMR 革新医院物流全流程
- 10 【展商推荐】因时机器人:专注于微型精密运动部件研发制造和伺服控制技术突破创新



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论