





沈阳自动化所在外肌肉机器人领域取得新进展

基于相变量的人体运动类型识别方法流程图
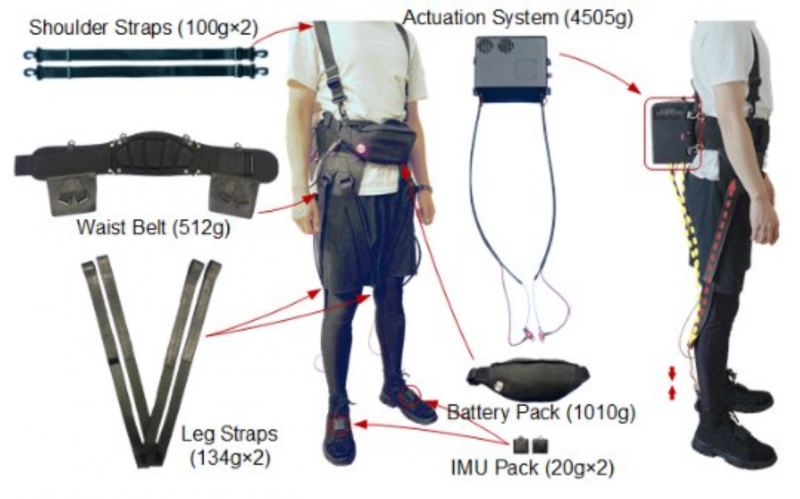
外肌肉机器人系统各组件示意图
近日,中国科学院沈阳自动化研究所在外肌肉机器人领域取得新进展,研究的具备高泛化能力的人体运动识别方法,与对人体步频特性不敏感的外肌肉机器人系统,对提升机器人适应能力、辅助效率以及对促进机器人在智能医疗、智能养老等领域的实用化具有重要意义。相关论文分别被IEEE Transactions on Human-Machine Systems和IEEE Transactions on Automation Science and Engineering 录用。
根据第七次全国人口普查数据,国内60岁及以上人口约有2.6亿人,占总比18.7%,标志着我国已经进入了老龄化社会。老年人的身体机能衰退、肌肉功能退化等问题,导致他们逐渐脱离社会,随之带来的是生活质量与尊重程度的双重下降。外肌肉机器人是与人共融机器人的一种,通过驱动“附着”在人体肌肉/肌腱表面的人工肌肉线束,实现对目标肌群的精准辅助。相较于外骨骼机器人,外肌肉机器人具有更柔性的本体与更精准的辅助方式,可有效促进穿戴者肌肉功能重建。但这种人机同体的紧密作业方式,致使穿戴者的运动很容易受到机器人在决策与行为方面的偏差的影响,而如何提升机器人对穿戴者运动状态的快速适应能力,是减少这种偏差的关键,也是当前机器人研究的难点。
沈阳自动化所控制组的科研人员以机器人识别与控制的高适应性为目标,受启发于人体下肢运动的状态驱动与节律/CPG驱动特点,开展了具备高适应性的人体运动识别与机器人控制方法的研究。基于人体相平面与相曲线的概念,利用相曲线的特征相似度不变特性,提出了一种可适应不同受试者、不同步态模式的人体运动类型识别方法,并进一步验证了在下肢运动障碍人群运动功能量化评估方面的应用可行性;结合人体下肢运动的节律特性,构建了一种可快速适应人体步频变化的外肌肉机器人控制系统,提升机器人对人体步频、运动环境与人机耦合动力学特性等变化的快速适应能力。该研究将人体运动更本质的特性融入到机器人交互系统设计当中,为机器人策略设计与行为规划的研究提供了新的思路。
沈阳自动化所控制组在康复机器人、脑肌电信号处理等领域开展了系统性的理论及应用研究工作,研究成果先后发表在多个知名国际期刊上。研究工作得到国家自然科学基金、国家重点研发计划等项目的支持。

 分享
分享
图片新闻




中国机器人产业大会圆满收官!")



最新活动更多
-
6月13日立即参评>> 【评选】维科杯·OFweek2025中国工业自动化及数字化行业年度评选
-
6月13日立即参评>> 【评选启动】维科杯·OFweek(第四届)2025汽车行业年度评选
-
6月13日立即参评 >> 【评选启动】维科杯·OFweek 2025(第十届)人工智能行业年度评选
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
-
7月31日免费预约>> OFweek 2025具身机器人动力电池技术应用大会
-
即日-2025.8.1立即下载>> 《2024智能制造产业高端化、智能化、绿色化发展蓝皮书》
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")
- 1 人形机器人革命,NVIDIA如何破局?
- 2 《2025机器人+应用与产业链新一轮加速发展蓝皮书》电子版限免下载!
- 3 【展商推荐】意优科技:专注于人形机器人关节模组的研发与生产
- 4 用信步工控主板,当行业冠军,“天工”机器人马拉松夺冠!
- 5 MOONLIGHT 玄晖成为全球首款获得 CE+ETL双认证的力控型并联机器人
- 6 MiR 发布最新电子书,揭示AMR 革新医院物流全流程
- 7 谁将成为行业榜样?维科杯·OFweek2025中国工业自动化及数字化行业年度评选邀您参与!
- 8 【展商推荐】因时机器人:专注于微型精密运动部件研发制造和伺服控制技术突破创新
- 9 【展商推荐】意优科技:专注人形机器人关节模组的研发与生产
- 10 市占率超70%领跑人形机器人赛道!国产六维力传感器突围 获智元/小米等头部客户批量应用



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论