





机器人课程系列:如何安装ROS(Robot Operating System,机器人操作系统)

由上图可以看到,在PC端的系统有Windows、Linux与Mac,而在手持系装置有Android和iOS占大宗,看来ROS的目标就是想做机器人的Android系统。
ROS是什么?
维基上ROS的定义如下,
ROS(机器人操作系统,RobotOperating System),是专为机器人软件开发所设计出来的一套电脑操作系统架构。它是一个开源的元级操作系统(后操作系统),提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共享功能的执行、程序间消息传递、程序发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。
之前的课程里分享了很多机器人的专案,很多伙伴也都有做各种不同的机器人,例如:双足机器人、教育型机器人或是Arduino的关节型机器人。这些机器人有些没有操作系统,且硬件设计都不一样,如果在新的项目只是想用之前设计的一部分的话,代表要重复制作,才有办法使用到别人早就做过的东西。
由于code无法维护,因此当项目时程不明确,且软件人员离职后,新来的程序员还要看懂前人所留下的自闭软件系统,等到三个月试用期一过,又离职到其他公司上班了!如此重复造轮子,PM要先跳脚,专案就要爆炸了!
所以,这时ROS就这么横空出世了!(当然这不是理由,哈哈)
在机器人智慧化的过程当中,ROS(机器人操作系统)成为最关键的一环,当机器人要投入生活甚至是医疗等更多元的场景时,皆需要面对相较普通的生产线以及更复杂的空间环境,而ROS也相较于我们大脑的中枢,不仅能汇集环境变动的数据,亦能分析服务对象的空间位置,进而提供对应的服务操作。
回到设计的需求,用ROS跑项目的确可以加速进行。基本上ROS的核心精神就是在巴别塔里面讲着相同的语言。
总而言之,就是不要再重复造部件!而ROS是架构在Linux内的一套软件,所以只要有Ubuntu就行啦!这次我们用仿真器,可以是VMWARE或是Virtual Box,使用Ubuntu 16.04安装ROS Kinetic,但在2018五月时,ROS推出了Melodic,也有网友在Ubuntu 18.04安装,基本上也没什么问题!
ROS安装过程
这篇文章在VMWARE使用ubuntu-16.04.5-desktop-amd64.iso。

在安装过程中,会需要输入Ubuntu的账号及密码。

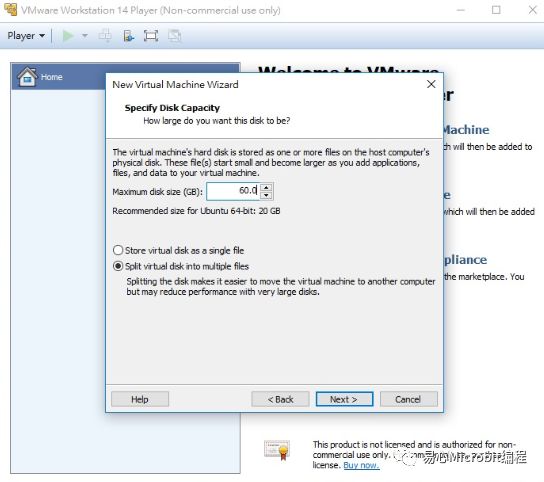
下图有一点小小提示,本来作者是用预设的20GB,但在尝试ROS的仿真器与程序代码后,东灌西灌的结果就是20GB搞到要爆炸了,所以建议60GB会比较好一点点。
简单提一下,作者的MAC Air 128G一开始是用双系统切了一半过去,用了1个月后系统容量爆炸,完完全全不够用啊!!!之后再来提一下MAC系统如果不是只想模拟该怎么办。
由于这篇文章目的在模拟,所以在Windows与MAC OS都能用VMWARE或是Virtual Box,但问题来了,如果您是研究所以上的学生,教授要您做出硬件来,VMWARE或是Virtual Box都无法控制到远程的硬件啊!这也是作者试了好几次才发现,一定要用原生的Linux系统加上ROS才行啊!!!所以建议在Windows上的解决方式是直接做双系统,反正硬盘够大,但UEFI的BIOS也搞了许久。
而在MAC Air就不能切双系统了,128G切一半就不能拿来工作了,所以在MAC Air是用外接128G USB随身碟安装Ubuntu,这也搞了许久,总之Windows与MAC OS安装ROS都可以写一篇文章了。好,回到开始用VMWARE安装Ubuntu的时候,会看到下图,这时可以去喝杯饮料悠闲的等待~

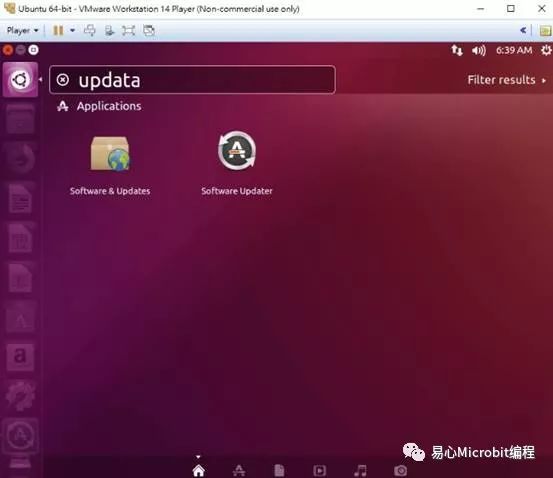
安装完毕后,可以去更新一下在Software & Updates,但不更新也可以准备安装就是了。
然后在Terminal输入以下指令:
sudo sh -c ‘echo “debhttp://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
这个时候会请您输入密码,之后再贴上KEY的指令(如下方指令):
sudo apt-key adv –keyserverhkp://ha.pool.sks-keyservers.net:80 –recv-key421C365BD9FF1F717815A3895523BAEEB01FA116

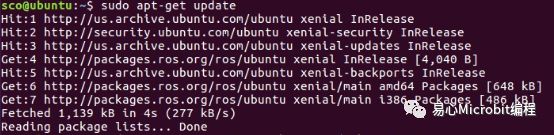
然后再sudo apt-get update:
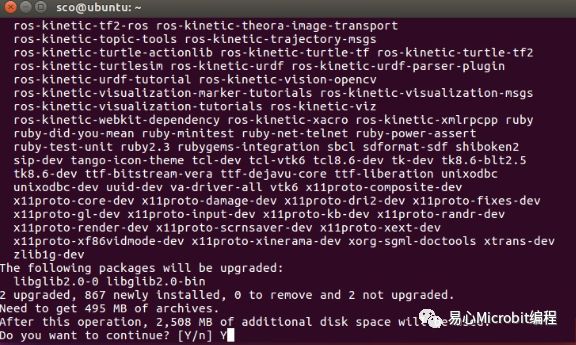
接着sudo apt-get upgrade升所有需要的安装包:

所以建议前面不要Software & Update也可以,接着就是安装Desktop-Full版本的ROS系统在Ubuntu内:sudo apt-get install ros-kinetic-desktop-full

安装完毕,再来呢?接下就就是要初始化!
sudo rosdep init
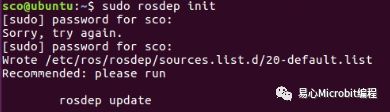
rosdep update

配置环变量:
echo “source /opt/ros/kinetic/setup.bash”>> ~/.bashrc
source ~/.bashrc

上面2句还挺重要的,不然每次ROSRUN xxx什么安装包都出现Error,例如:

But!人生就是有这个But!
印象中有一次在Windows的VMWARE中也输入上面2句然后再ROSRUN还是出现Error,所以就开了MAC Air内的Ubuntu看了一下.bashrc檔照抄:

红框是有修正过的,如果您下了ROSRUN的指令也出现Error,就照抄Source的那行吧!
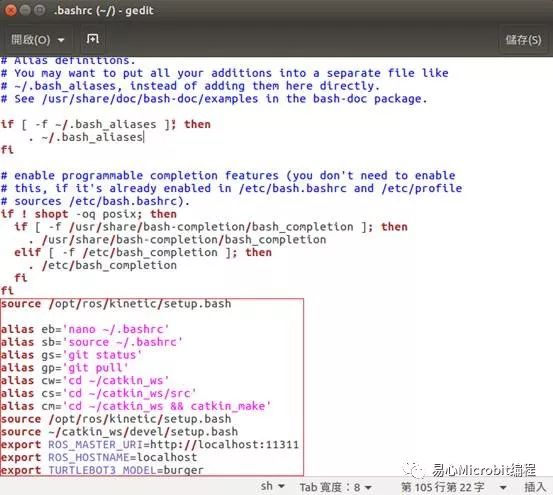
许眼尖的读者会发现上面的.bashrc档最后一行是TURTLEBOT3!
作者当初就是在Windows的VMWARE安装UBUNTU及MAC Air安装Virtual Box,不论是在哪台机器都控制不了Turtlebot3的硬件啊!至于如何控制硬件!?接下来安装所有以后可能用的到的套件:
sudo apt-get install python-rosinstallpython-rosinstall-generator python-wstool build-essential
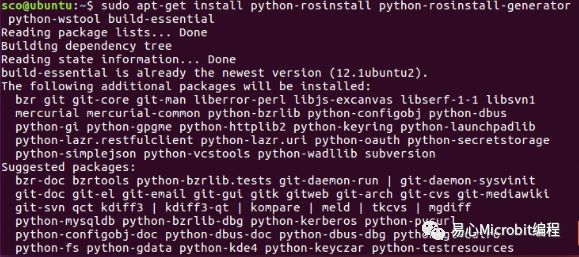
安装结束啰 ~ 而本篇的最后,就是来个roscore测试一下!

然后看到如下图的描述没出现Error就正确啦~

恭喜各位进入ROS的世界!!!


 分享
分享
图片新闻








最新活动更多
-
4日10日立即报名>> OFweek 2025(第十四届)中国机器人产业大会
-
泰科电子立即查看>> 创新的工业机器人解决方案
-
4月23日立即报名>> 【在线会议】研华嵌入式核心优势,以Edge AI驱动机器视觉升级
-
4月25日立即报名>> 【线下论坛】新唐科技2025新品发布会
-
4月30日立即参与 >> 【白皮书】研华机器视觉项目召集令
-
限时免费下载立即下载 >>> 2024“机器人+”行业应用创新发展蓝皮书
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论