





看看这些?移植无人驾驶技术方案开发的扫地机器人
移植无人驾驶的一些技术方案来开发扫地机器人,这些年逐渐成为一个看起来比较新鲜的现象。
其实这两者本身就是相通的——毕竟“无人驾驶”汽车同样可以被看作“轮式移动机器人”,通过车载传感器建立高清地图,并自动规划行车路线,从而达到“无人驾驶”的目的。
而且“无人驾驶”还是一个比较宽泛的定义,按照国际自动机械工程师学会(SAE)的标准,目前有L0-L5共六个级别:
L1代表辅助驾驶,预警类ADAS功能,比如偏离车道预警;L2代表部分自动驾驶,辅助干预ADAS功能,比如ACC自适应巡航、紧急自动刹车、车道保持辅助;L3代表有条件自动驾驶,在辅助干预的基础上增加了自动加速、自动刹车以及自动转向等;
L4代表高度自动驾驶,这个级别能实现完全没有人类司机,也可以没有方向盘、油门、刹车踏板等,不过限定驾驶区域和环境;L5是理想中的完全自动驾驶,没有司机、方向盘、油门、刹车踏板,并且不限制区域。
目前,无论是低阶的L1和L2,还是高阶的L3、L4、L5,都需要传感器监控行车环境和行车条件,并且随着方案档次提升,对传感器的依赖程度越大。目前很多量产车型都已经拥有了L1、L2的自动驾驶能力,甚至一些厂商已经拥有了L3级别的自动驾驶能力。
由此,产业在研发自动驾驶的技术路径当中,产生了大量不同代际针对传感器应用的技术成果,相应算法、决策层的软件方面的迭代良多,将一些业已成形的方案移植给扫地机器人算是水到渠成。
以石头扫地机器人T7 Pro为例,它就是一个微缩迷你的无人驾驶“汽车”,其采用了 AI 双目视觉模块,由2颗500W像素120°广角摄像头和红外补光灯、回充传感器等器件组成,就如同无人驾驶汽车一样,全身都遍布传感器并依靠传感器感知外界环境。
在无人驾驶领域,汽车多目摄像头、环视摄像头、毫米波雷达、超声波传感器,甚至车舱内的驾驶状态监测摄像头工作过程当中会产出大量数据,需要数据中枢对数据加以毫秒级的运算进行分析,才能得到准确、安全的路线。
我们在石头扫地机器人T7 Pro上也能看到肩负这项任务的“大脑”——其同时配备高通 8 核处理器平台,算力大致相当于骁龙625,在扫地机器人这样的产品当中算是相当彪悍了。
由此,结合高算力的处理器平台,石头扫地机器人T7 Pro可以通过双目立体视觉技术和 AI 物体识别技术,用大视角双目摄像头获取环境深度信息,同时采用卷积神经网络深度学习进行AI物体识别,基于障碍物类别和深度信息进行避障策略判断进而精准避障。
经过大量的 AI 学习之后,现如今的石头扫地机器人T7 Pro已经实现了识别9类的常见障碍物,包括鞋子,底座,体重秤,插线板,线团,排泄物,袜子,簸箕,U 型椅等其他种类。
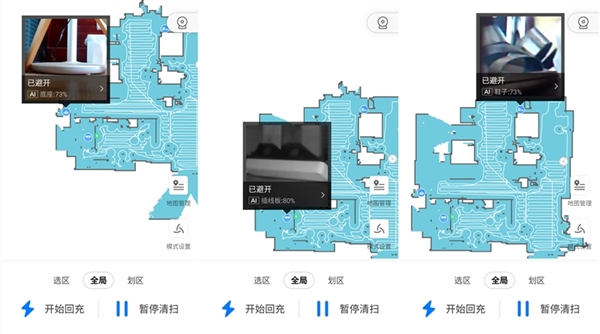
举个例子,如果在清扫路线上有一块插线板,扫地机器的摄像头捕捉到这一图像信息并反馈给处理器平台,成功辨识出是“插线板”,便自行做了减速处理,然后绕过障碍物,确实能够让清扫效率大大提升。

简单来说,曾经高高在上的无人驾驶技术方案在今天并不是不能触及的神秘领域,扫地机器人未来也必然将有越来越高的技术含量,以区别于传统产品来打造差异化形态,并实实在在地为用户生活带来更理想的体验。
来源:快科技

 分享
分享
图片新闻




中国机器人产业大会圆满收官!")



最新活动更多
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")
- 1 【独家深度】2025年中国机器人激光雷达行业市场调研
- 2 人形机器人革命,NVIDIA如何破局?
- 3 《2025机器人+应用与产业链新一轮加速发展蓝皮书》电子版限免下载!
- 4 用信步工控主板,当行业冠军,“天工”机器人马拉松夺冠!
- 5 MOONLIGHT 玄晖成为全球首款获得 CE+ETL双认证的力控型并联机器人
- 6 信步科技发布具身智能开发平台HB03,实现机器人“大、小脑融合”
- 7 【展商推荐】意优科技:专注于人形机器人关节模组的研发与生产
- 8 纤尘不染|新时达众为兴洁净型SCARA机器人新品重磅发布
- 9 MiR 发布最新电子书,揭示AMR 革新医院物流全流程
- 10 智同科技举行总部基地奠基仪式:以匠心筑基,与时代同行



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论