





工业机器人的结构和原理
工业机器人已经渗透到各行各业,帮助人们完成焊接、搬运、喷涂、冲压等各项任务,那么你有思考过机器人是怎么做到这一些的吗?它的内部结构又是怎样的呢?今天我们就通过一段动画视频,带大家了解工业机器人的结构和原理。
机器人可以分为硬件部分和软件部分,硬件部分主要包括本体和控制器,而软件部分主要指的是它的控制技术。
本体部分
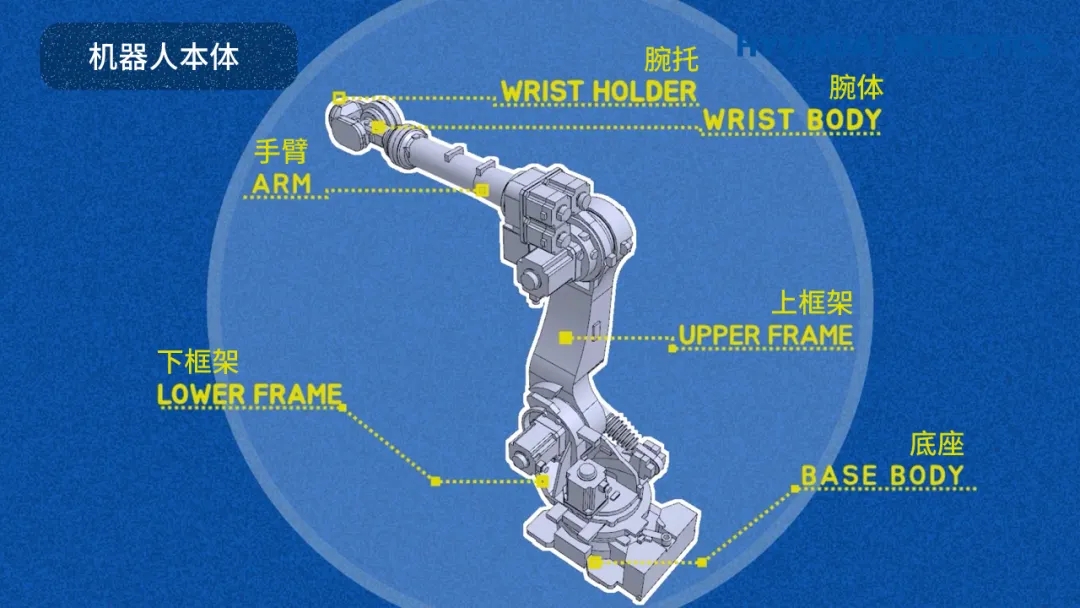
先来说下机器人的本体部分。工业机器人是仿照人的手臂来进行设计的。我们以现代机器人HS220型号为例,从外观来看,主要有底座、下框架、上框架、手臂、腕体、腕托等六个部分。
机器人的各个关节就和人类的肌肉一样,靠伺服电机和减速器来控制移动。伺服电机是动力的来源,机器人的运行速度以及负载重量如何,都和伺服电机有关。而减速器则是动力传输的中介,它拥有许多不同的尺寸。一般对于微型机器人来说,要求的重复精度都很高,一般在0.001英寸或0.0254毫米以下。伺服电机与减速器相连,可以帮助提高精度,提高减速器的传动比。

HS220拥有6个伺服电机和减速器,它们安装在每一个连接的接头上,使机器人可以向六个方向进行移动,也就是我们所说的六轴机器人。这六个方向分别是X轴-前后,Y轴-左右,Z轴-上下,RX-绕X轴旋转,RY-绕Y轴旋转,RZ-绕Z轴旋转。正是这种拥有多个维度移动的能力,机器人才可以摆出不同的姿势,完成各项任务。
控制器
机器人的控制器相当于机器人的大脑,它参与的是计算发送指令和能量供应的整个过程,它根据指令以及传感器信息控制机器人完成一定的动作或作业任务,是决定机器人功能和性能的主要因素。

现代机器人最新款Hi6-S控制柜
除了以上两大部件外,机器人的硬件部分还包括:
SMPS,开关电源提供能量;
CPU模块,控制行动;
伺服驱动模块,控制电流让机器人关节移动;
持续模块,相当于人类的交感神经,接管机器人的安全、迅速控制机器人以及紧急情况停止等;
输入输出模块,相当于检测反应神经,是机器人与外部世界的接口。
控制技术
机器人的控制技术,指的是快速准确地操作机器人应用的一个领域。机器人的一大优点就是它的程序可以很容易修改,这一点可以让他们在不同的场景切换使用。为了能够使人们操控机器人,就必须依靠示教器来进行。在示教器的显示界面上,我们可以看到机器人的编程语言HR Basic以及机器人的各项状态。我们可以通过示教器来完成机器人的编程。

控制技术的第二个部分是通过绘制表格,然后根据图表来控制机器人的运动。我们可以使用计算出的力学数据来完成对机器人的规划和动作控制。
此外,机器视觉,以及最近热门的人工智能沉浸式深度学习及分类等这些,都是属于控制技术的范畴。
现代机器人也有专门的研发团队,来研究机器人的控制技术。除此之外,我们也有机械系统研发团队来负责机器人的本体,控制平台团队负责控制器,以及应用控制团队负责控制技术。正是多个部门的团结协作,才组成了如今的现代机器人。

 分享
分享
图片新闻




中国机器人产业大会圆满收官!")



最新活动更多
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")
- 1 【独家深度】2025年中国机器人激光雷达行业市场调研
- 2 人形机器人革命,NVIDIA如何破局?
- 3 《2025机器人+应用与产业链新一轮加速发展蓝皮书》电子版限免下载!
- 4 MOONLIGHT 玄晖成为全球首款获得 CE+ETL双认证的力控型并联机器人
- 5 信步科技发布具身智能开发平台HB03,实现机器人“大、小脑融合”
- 6 用信步工控主板,当行业冠军,“天工”机器人马拉松夺冠!
- 7 【展商推荐】意优科技:专注于人形机器人关节模组的研发与生产
- 8 纤尘不染|新时达众为兴洁净型SCARA机器人新品重磅发布
- 9 MiR 发布最新电子书,揭示AMR 革新医院物流全流程
- 10 智同科技举行总部基地奠基仪式:以匠心筑基,与时代同行



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论