





制作机器人的步骤详解

今天我们来聊聊怎么制作属于自己机器人。这一次主要针对的对象,是希望能亲手制作出一只机器人的朋友。
建立基本概念
在开始着手设计及制作机器人之前,首先要建立三个基本观念:
一、强大的内在动机
如同许多成功学大师告诉我们的:「强大的内在动机,是驱使我们去克服万难达成目标的关键。」为什么呢?我们常说能够从机器人学习到太多的知识,换个角度来看,其实这也是告诉我们,机器人涵盖了众多知识领域。完成一个机器人,至少需具备下列几项知识和技能:机械、电子、电机、资讯工程、仿生学等等。
更进一步,甚至连工业设计、动物行为学和人类心理学都需要涉略。也就是因为包含了这么多的技术及知识领域,在制作机器人的过程中,欠缺任何一项技能,都可能造成过程的瓶颈,而无法完成机器人的制作,甚至终结了对机器人的兴趣。所以唯有强大热爱机器人的内在动机,才可能持续维持这项兴趣,并有恒心毅力来不断学习,以便克服一切障碍。
二、简单明确的设计
正如同许多玩家前辈所建议的,另一个重要的心法就是遵循KISS法则(Keep It Simple and Stupid): 保持简单明确!无论在任何阶段,这都是非常睿智的建议。
三、把钱准备好
老实说,玩机器人可以是很花钱的兴趣,无论玩的是机器人套件,还是DIY自行制作机器人。对刚投入这个领域的玩家来说尤其如此。因为投入这个领域的初期,首先还没有足够的经验去挑选零件,很可能会投资一些冤枉钱在不需要或错误的零件上;同时,手边也还没有累积足够的零件和工具来使用;另外就是因为经验不足,在组装测试过程中也常有机会搞坏部分零件或工具,而必须重新购买。因此在全心投入机器人组装之前,需要先做些功课,并规划好预算。
要确定自己做出来的东西可以称为机器人,首先我们再回顾一下机器人的定义:「人类制造的机械装置,能对周边环境做出适当的响应、自主判断并达成特定任务。」也就是说,机器人必须具备感知环境、做出判断,并产生行动的能力。以机器人踢球为例,首先它要看得到球(感知环境),接着需判断要将球踢到哪里去(做出判断),最后产生踢球的动作,将球踢出去(产生行动)。这一系列的过程,跟人类足球员踢球的过程是很类似的。

机器人动作三阶段 开始制作机器人
有了基本观念后,接下来让我们开始制作机器人。一共包含了四个步骤:机器人概念设计、零件选用、机器人组装、和程控。
一、机器人概念设计
制作机器人的第一步,并不是直接拿起木板到锯床上切割。而是拿出白纸,先将想做的机器人雏型规划出来。这阶段,主要需定义机器人的功能、决定机器人的载具和移动方式,以及确认预定采用的机器人的控制方式。
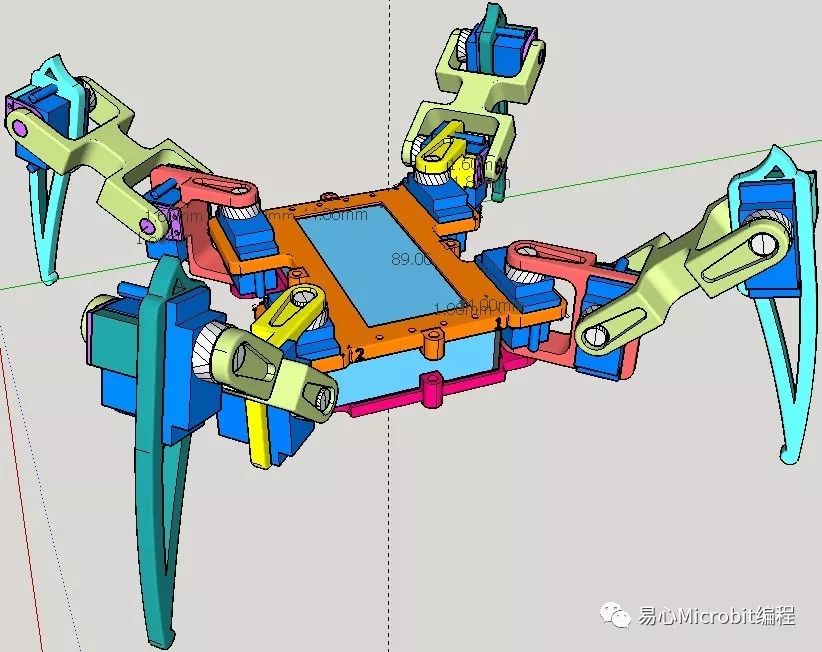
蜘蛛机器人设计图(来源:Regis [雷基士])
1.定义机器人的功能:
第一只机器人的功能建议不要太过困难或复杂,最好以进行简单的任务为目标(记得KISS法则吗?)。在这个阶段,我们希望可透过设计和组装的过程,来学习和机器人相关的知识和技能,并藉此慢慢累积成就感和经验。所以让我们暂时将制作出钢铁人飞行装的伟大计划,推迟到之后几个项目再来执行。
2.决定机器人的载具和移动方式:
机器人的载具可能是机械手臂、八脚蜘蛛、或是轮车等等。同时也须思考机器人该要如何移动,用双脚、四肢、八爪或是用轮子。
3.确认机器人的控制方式:
要使用有线控制(电线、网络线)?无线控制(红外线、蓝芽、WIFI、GPRS、无线射频)?还是自主控制?

 分享
分享
图片新闻








最新活动更多
-
4日10日立即报名>> OFweek 2025(第十四届)中国机器人产业大会
-
泰科电子立即查看>> 创新的工业机器人解决方案
-
4月23日立即报名>> 【在线会议】研华嵌入式核心优势,以Edge AI驱动机器视觉升级
-
4月25日立即报名>> 【线下论坛】新唐科技2025新品发布会
-
4月30日立即参与 >> 【白皮书】研华机器视觉项目召集令
-
限时免费下载立即下载 >>> 2024“机器人+”行业应用创新发展蓝皮书
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论