





限时免费下载 2024“机器人+”行业应用创新发展蓝皮书
立即下载 >>>
7.30-8.1 全数会2025(第六届)机器人及智能工厂展
火热报名中>>
酷炸!日本人形机器人「驾驶汽车」,可看红绿灯踩油门刹车!
但是人形机器人驾驶汽车的研究也是有很重要的意义的:2015年在美国举办的DARPA机器人挑战赛里就有一项机器人充当司机驾驶吉普车的任务。小编私以为,研究人形机器人可以提升人形机器人的功能性,驾驶作为一个需要综合多方面因素的任务(集合机器人设计,运动控制,人工智能算法等),可以很好的作为一个特定的研究课题来提升人形机器人的综合性能;另外,研究人形机器人驾驶还将成果转移到开发相应的机械臂或者机械腿,来为肢体有残缺的人士提供可靠的功能性的智能义肢,让他们能够拥有和其他人一样的生活和运动能力。

呆萌的老司机Musashi人形机器人
近期来自日本东京大学的研究团队基于他们之前的人形机器人的研究,研发了一款用于驾驶汽车的人形机器人司机,并将研究成果刊登于国际机器人期刊《IEEE机器人与自动化杂志(Robotics and automation magazine)》,论文信息请看文末。这位机器人老司机名叫Musashi,不同于大多数人形机器人依靠关节电机驱动,Musashi被设计为具有像人一样的肌肉-骨骼结构。他全神具有74块人工肌肉,以及39个关节(不包括手部的关节)。而本研究的亮点也就是尽量模仿人类的动作和功能来实现机器人的自动驾驶。(东京大学的人形机器人团队曾经于2017年刊登一篇《科学机器人学》(Science Robotics)封面文章,详细讲解了他们的“肌肉-骨骼”人形机器人系统设计,感兴趣的可以参考文末的论文链接。)
我们先来欣赏一下“机器人老司机”的一些镜头!文末附有完整的视频。在下一部分会为大家介绍如何设计以及实现人形机器人驾驶。
单手玩儿方向盘,不安全噢!
双手转方向盘,这才是正确操作吧!
踩油门
细节动作:拧钥匙,拉手刹,打转向灯

后视镜识别人
培训完成,老司机上路啦!
二. 类人机器人的“骨骼肌肉”系统设计以及控制
“肌肉-骨骼”机器人Musashi模仿人类的身体结构设计和制造,具有冗余的传感器和柔性的身体结构。这些特性非常适合在复杂的环境中交互,例如在狭小的汽车中驾驶的行为。研究者期望设计的机器人能够坐到汽车座位中,并且可以用脚踩刹车和油门,同时可以用双手操作方向盘。为了实现上述的目的,研究者需要从硬件和软件等多个方面综合设计这款机器人,具体包括:1. 机器人身体比例;2.机器人身体的柔性;3. 冗余传感系统和一个可以控制机器人“智能系统”。
研究者对Musashi的肌肉模块驱动器进行了重点设计和研发。柔性的“人工肌肉”是本研究中的硬件核心所在。肌肉模块是由电机通过滑轮绕线驱动,为了让机器人有一定的自体柔性,研究者们在每一个“人工肌肉”末端添加了一个非线性弹性单元(NEU)。非线性弹性单元由一个纤维增强的弹性圈充当,自身具有柔性,非常适合于环境交互。每一个肌肉驱动单元都含有可以测量肌肉张力,肌肉温度以及肌肉长度的传感器。肌肉模块连接到骨架上,非线性弹性单元连接到肌肉末端。像人类一样,Musashi的关节由一对肌肉模块以对抗(antagonistic)的形式安装驱动。

驱动单元设计
机器人的手臂结构如图,Musashi的手臂基本上是按照人类的手臂进行设计。并且进行了模块化设计和组装。它的其余部分(例如腿部)等需要肌肉驱动的关节都可以利用模块化设计组装。在机器人的每一个关节里包含有位置传感器,IMU等传感器,能够读取到每一个关节的角度和姿态。
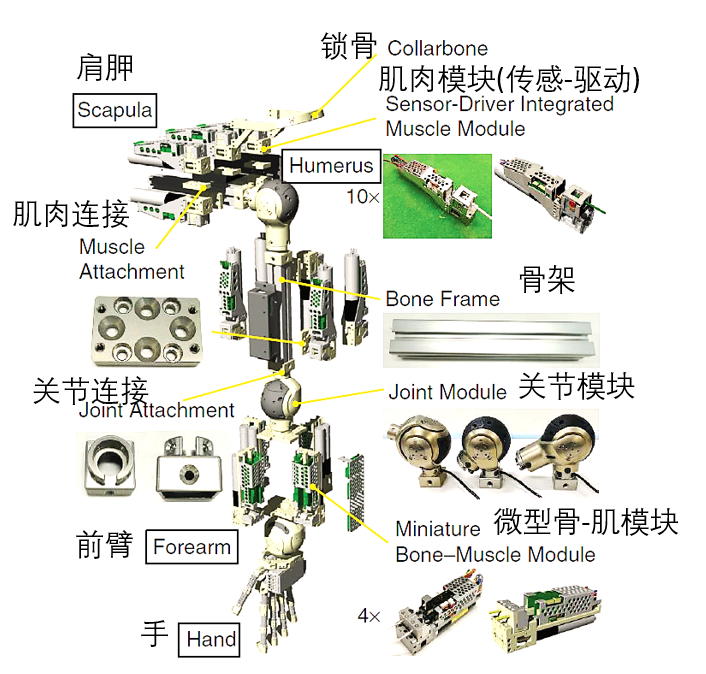
机械手模块化设计说明

 分享
分享
图片新闻








最新活动更多
-
泰科电子立即查看>> 创新的工业机器人解决方案
-
4月23日立即报名>> 【在线会议】研华嵌入式核心优势,以Edge AI驱动机器视觉升级
-
4月25日立即报名>> 【线下论坛】新唐科技2025新品发布会
-
4月30日立即参与 >> 【白皮书】研华机器视觉项目召集令
-
限时免费下载立即下载 >>> 2024“机器人+”行业应用创新发展蓝皮书
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
推荐专题

 中国机器人产业大会 暨维科杯机器人行业评选颁奖典礼")

国际无人机系统产业大会")
- 1 非夕科技亮相ITES:表面处理、装配测试、视觉伺服......自适应机器人带来智造新范式
- 2 大会嘉宾|哈尔滨工业大学(深圳)智能学部主任楼云江出席“OFweek 2025(第十四届)中国机器人产业大会”并发表演讲
- 3 重磅 | “维科杯·OFweek 2024中国机器人行业年度评选”入围名单揭晓!
- 4 齐聚鹏城,OFweek 2025(第十四届)中国机器人产业大会与您相约四月!
- 5 开年王炸!6亿订单砸向杭州具身智能大脑企业
- 6 精业锐志,极致创新!ITES深圳工业展助力制造业开年起步即冲刺!
- 7 蓝点触控闪耀2025深圳工业展力控技术赋能智能未来
- 8 iEi威强电IMBA-AM5荣获控制产品“新质奖”,精彩亮相中国自动化+数字化产业年会!
- 9 大咖齐聚,智启新篇 | OFweek 2025(第十四届)中国机器人产业大会圆满收官!
- 10 高光时刻!“维科杯?OFweek 2024 中国机器人行业年度评选” 获奖榜单发布












发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论